
- A new robotic framework that brings modernity into robotic application
- Dataflow Oriented Robotics Architecture
- Making robotic applications fast and simple!
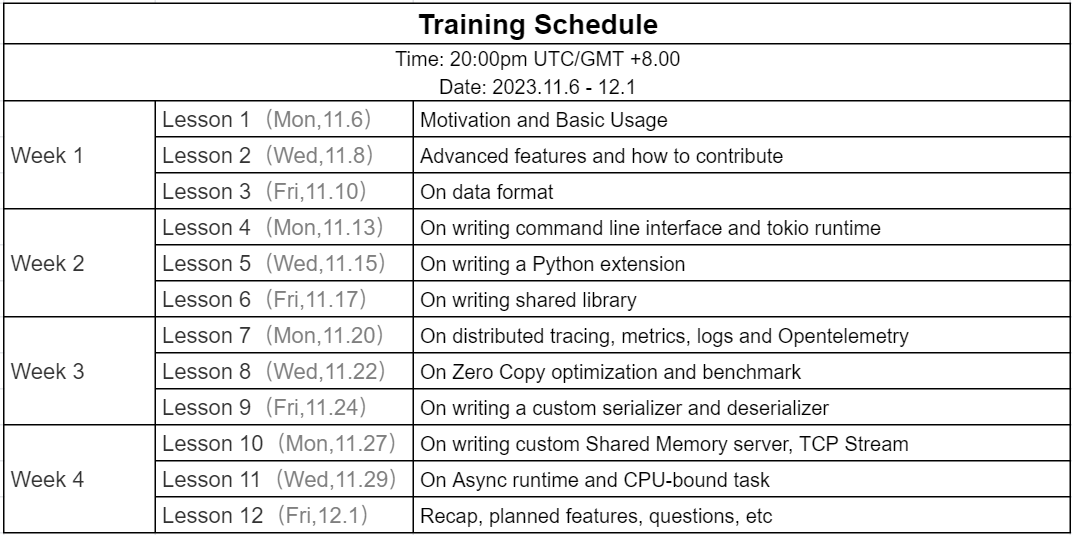
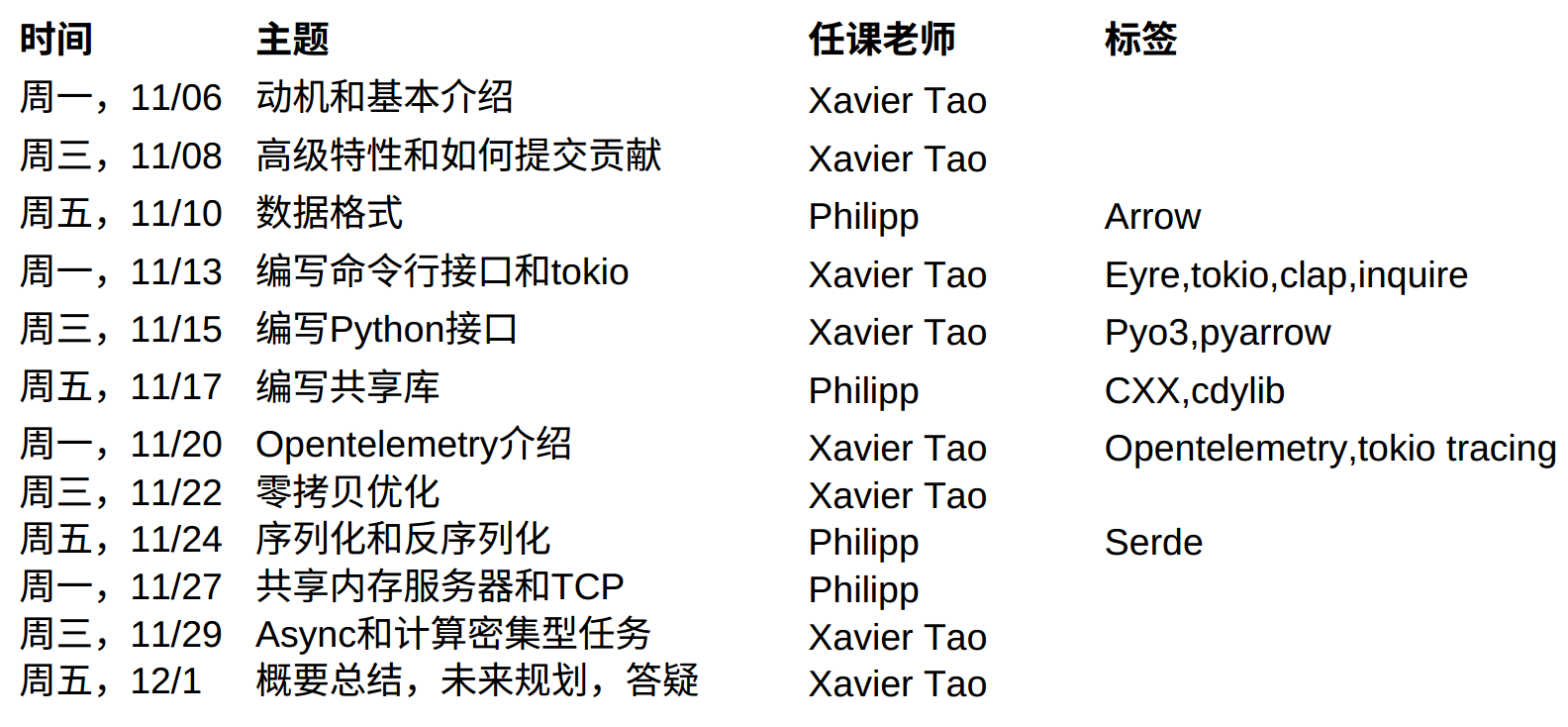
Training Schedule
Week 1
Lesson 1(Mon,11.6): Motivation and Basic Usage
Lesson 2(Wed,11.8): Advanced features and how to contribute
Lesson 3(Fri,11.10): On data format
Week 2
Lesson 4(Mon,11.13): On writing command line interface and tokio runtime
Lesson 5(Wed,11.15): On writing a Python extension
Lesson 6(Fri,11.17): On writing shared library
Week 3
Lesson 7(Mon,11.20): On distributed tracing, metrics, logs and Opentelemetry
Lesson 8(Wed,11.22): On Zero Copy optimization and benchmark
Lesson 9(Fri,11.24): On writing a custom serializer and deserializer
Week 4
Lesson 10(Mon,11.27): On writing custom Shared Memory server, TCP Stream
Lesson 11(Wed,11.29): On Async runtime and CPU-bound task
Lesson 12(Fri,12.1): Recap, planned features, questions, etc
Teacher Introduction:
PHILIPP
Philipp Oppermann is a freelance Rust developer from Germany. He is interested in operating systems, embedded, and open-source software in general. His best-known project is the "Writing an OS in Rust" blog, which builds a basic x86 OS from scratch. Apart from dora-rs, he contributes to the x86_64, bootloader, and volatile crates, and is the main editor of the regular "This Month in Rust OSDev" newsletter.
Xavier Tao
Xavier Tao is a French software engineer developing practical open source ML/IA solutions. One previous project is Wonnx, a webGPU-based ONNX inference run-time fully written in Rust, which allows it to be available on internet browsers and natively on computers. Xavier is currently fully invested in the dora-rs robotic framework project. Dora-rs aims to make building robots fast and easy.
Time: 20:00pm UTC/GMT +8.00
Date: 2023.11.6 - 12.1
备注:Dora-rs Online Course Learners 微信学习交流群
